Tip of the Day 64: Time to Compute Alarms
Following on from tip #63 (When is the Robot Listening?)…
Concept #3: It takes a little time for the eDART to compute integrals
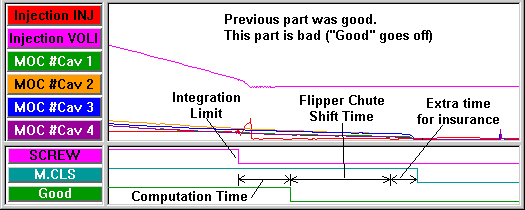
When the time in the cycle reaches the “Integration Limit” the eDART must do its math to compute the integrals. The computer is fast but not instantaneous. It takes some fraction of a second to do its computations. More time is required with more sensors. You need to account for this time to allow the automation to pick up the sorting signal.
Level Actuated:
In level actuated systems the computation time must be included in the time to reach the level. For example suppose a flipper chute can reverse position in ½ second and the computation of all of the integrals takes ¼ of a second. Then the integration limit (and Screw Run) must end at least ¾ of a second before the mold opens. Setting the integration time to one second before mold open would be safest.
Edge Actuated:
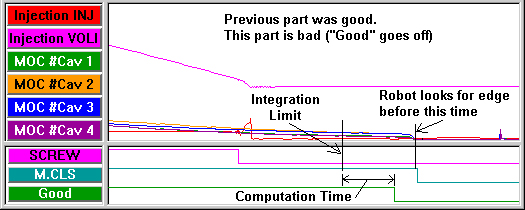
In edge actuated systems the integration limit must be early enough to allow for the computation time before the automation “looks” for the signal.
“Race Condition”:
This is a term used in the electrical business. It means that if two things happen at the “exact” same time they are never exact. One will always be a fraction of a second later than the other. And this fraction can change from one shot to the next depending on how relays switch etc.
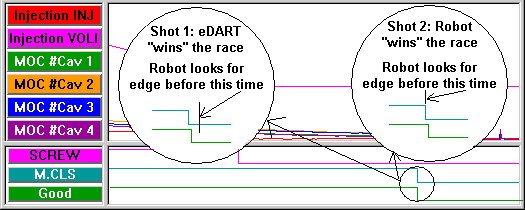
In our examples, if you set the integration limit to Mold Clamped off and the automation is looking for the edge at the same time then on one shot it may pick up the correct signal and on another it may not. The example below shows how this can happen. The eDART is finishing its computation and sorting output almost exactly at Mold Clamped. The robot is also using mold clamped for its timing. Depending on the robot’s control loop timing it may look for the signal late (“Shot 1”) or early (“Shot 2”).
The enlarged circles show a zoom in time on the Mold Clamped from the machine and the Good from the eDART.
This is why you need to know just when the automation is looking for the signal. The eDART’s integration limit plus computation time must be early enough to avoid the “Race Condition.”